 |
 |
 |
|
|
|
|
Differential Matching and Tracking
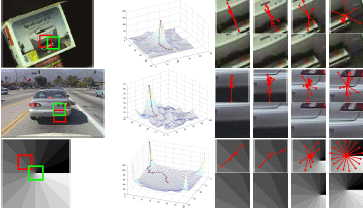
Efficient search for best matches is critical for tracking. Different from exhaustive search and sampling-based methods that are in general computationally demanding, di erential tracking can be much more efficient in finding best local matches.
A fundamental issue is that some motion parameters may not be recoverable from image measurements and are unobservable in the visual dynamic system. We studied this important issue of singularity in the context of kernel-based tracking, and proposed a novel and practical method of collaborative kernel tracking. Recently, we have found a new and efficient method for optimal kernel placement for avoiding the singularity.
Another fundamental issue is the compromise between the flexibility of matching and the ability of motion recovery. Localized matching (e.g., image templates) and global ones (e.g., histograms) are extreme cases. We proposed a new differential approach that integrates the advantages of both by combining local appearances variations and global spatial structures. It can handle appearance variations induced by the local non-rigidity with efficient closed-form motion estimation.
|
|
|
|
|
|
|
|